|
[摘要]在全世界各地,有许多顶尖的工程师多年来将曾经无法想象的技术或愿景变成现实,正在帮助全人类走向曾经只存在于科幻电影中的场景中。
腾讯数码讯(编译:多多)我们正在改变的路上,无人驾驶汽车已经开始在街头行驶,终极目标就是让交通变得更加安全。无人驾驶汽车看起来是一个来自未来的梦想,但是现在已经开始向目标靠近,虽然这是一个特别漫长的过程。现在,在全世界各地,有许多顶尖的工程师多年来将曾经无法想象的技术或愿景变成现实,正在帮助全人类走向曾经只存在于科幻电影中的场景中,正在不断努力缩小梦想和现实之间的技术差距。那么现在可以让我们一起来看看人类在迈向无人驾驶汽车道路上,都有哪些里程碑式的时刻。美国人迈出了第一步
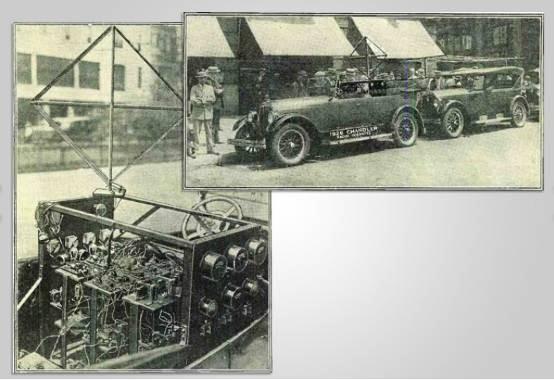 1925年8月,人类历史上第一辆有证可查的无人驾驶汽车正式亮相。来自美国陆军的电子工程师Francis P. Houdina坐在一辆用无线电操控着前车的汽车上。这两辆组合式的汽车通过后车发射无线电波来控制前车的方向盘、离合器、制动器等部件。虽然这种驾驶方式并不安全,也不完美,经常会把无线电波发送到其他接收器上,但是它可是真正意义上的第一辆“无人驾驶汽车”。未来的高速公路
1925年8月,人类历史上第一辆有证可查的无人驾驶汽车正式亮相。来自美国陆军的电子工程师Francis P. Houdina坐在一辆用无线电操控着前车的汽车上。这两辆组合式的汽车通过后车发射无线电波来控制前车的方向盘、离合器、制动器等部件。虽然这种驾驶方式并不安全,也不完美,经常会把无线电波发送到其他接收器上,但是它可是真正意义上的第一辆“无人驾驶汽车”。未来的高速公路 在1939年的纽约世界博览会上,美国通用汽车公司通用公司就建了一个名为未来世界的未来科技展览,展示他们对于汽车未来演进的想法。通用幻想着1960年时的美国高速公路都会配有类似火车轨一样设计,汽车将会配有自动驾驶系统,走到高速上就会自动生效,按照铁轨的轨迹和一定的速度高速行进,直到在高速公路的出口才会恢复成人类驾驶。在后来的1956年,通用正式对外展出了Firebird II概念车,这是世界上第一辆配备了汽车安全及自动导航系统的概念车。它使用了钛金属技术、电源盘式制动器、磁点火钥匙、独立控制的燃气涡轮动力等新概念,看上去像是一辆“火箭车”。1958年,第三代Firebird问世,并且BBC现场直播了通用在高速公路上对对自己无人驾驶概念车的测试。通用使用了预埋式的线缆向安装了接收器的汽车上发送电子脉冲信号。智能导航出现 在1939年的纽约世界博览会上,美国通用汽车公司通用公司就建了一个名为未来世界的未来科技展览,展示他们对于汽车未来演进的想法。通用幻想着1960年时的美国高速公路都会配有类似火车轨一样设计,汽车将会配有自动驾驶系统,走到高速上就会自动生效,按照铁轨的轨迹和一定的速度高速行进,直到在高速公路的出口才会恢复成人类驾驶。在后来的1956年,通用正式对外展出了Firebird II概念车,这是世界上第一辆配备了汽车安全及自动导航系统的概念车。它使用了钛金属技术、电源盘式制动器、磁点火钥匙、独立控制的燃气涡轮动力等新概念,看上去像是一辆“火箭车”。1958年,第三代Firebird问世,并且BBC现场直播了通用在高速公路上对对自己无人驾驶概念车的测试。通用使用了预埋式的线缆向安装了接收器的汽车上发送电子脉冲信号。智能导航出现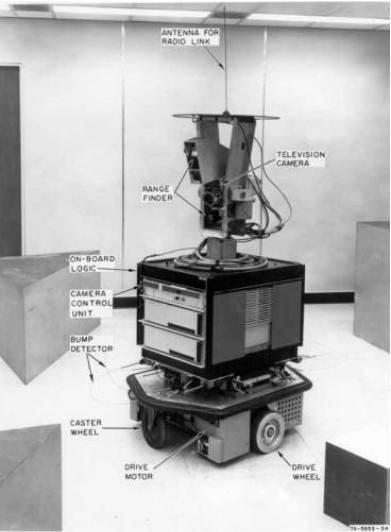 1966年,美国斯坦福大学研究所的SRI人工智能研究中心开始研发一款名叫Shakey拥有车轮结构的多功能机器,可以执行开关灯这样简单的动作。虽然Shakey始终只能在室内执行任务,但是其内置的传感器和软件系统都开创了自主自动导航功能的先河。人类并不可靠 1966年,美国斯坦福大学研究所的SRI人工智能研究中心开始研发一款名叫Shakey拥有车轮结构的多功能机器,可以执行开关灯这样简单的动作。虽然Shakey始终只能在室内执行任务,但是其内置的传感器和软件系统都开创了自主自动导航功能的先河。人类并不可靠 1971年,英国道路研究实验室(RRL)展示了测试了一辆与通用想法类似的自动驾驶汽车,并且还公布了一段视频。在视频里,车子的前排并没有人,仅有的一个人坐在后排,方向盘一直在自动“抖动”来调成方向。在车子的前保险杠位置,有一个特制的接收单元。电脑控制的电子脉冲信号通过这个单元传递给车子,以此达到控制转向的目的。在视频中,还表示这种驾驶功能将为公路和铁路带来更安全的驾驶他条件。随后,同年出现在《新科学家和科学之旅》杂志中由Slade Penoyre指出RRL这种系统要比普通人类驾驶汽车的安全性高出100倍。基于摄像头的巡航系统 1971年,英国道路研究实验室(RRL)展示了测试了一辆与通用想法类似的自动驾驶汽车,并且还公布了一段视频。在视频里,车子的前排并没有人,仅有的一个人坐在后排,方向盘一直在自动“抖动”来调成方向。在车子的前保险杠位置,有一个特制的接收单元。电脑控制的电子脉冲信号通过这个单元传递给车子,以此达到控制转向的目的。在视频中,还表示这种驾驶功能将为公路和铁路带来更安全的驾驶他条件。随后,同年出现在《新科学家和科学之旅》杂志中由Slade Penoyre指出RRL这种系统要比普通人类驾驶汽车的安全性高出100倍。基于摄像头的巡航系统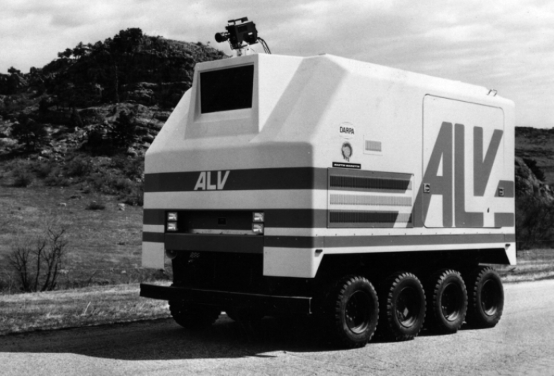 1977年,来自日本的筑波工程研究实验室开发出了第一个基于摄像头来检测前方标记或者导航信息的自动驾驶汽车,而放弃了之前一直使用的脉冲信号控制方式。这辆车内配备了两个摄像头,并用模拟计算机技术进行信号处理。时速能达到30公里,但需要高架轨道的辅助。到了1983年,美国国防部高级计划研究局,也就是大名鼎鼎的DARPA开启了名为陆地自动巡航(ALV)的新计划,这个计划的研究目的就是让汽车拥有充分的自主权,通过摄像头来检测地形,通过计算机系统计算出导航和行驶路线等解决方案。动态视觉 1977年,来自日本的筑波工程研究实验室开发出了第一个基于摄像头来检测前方标记或者导航信息的自动驾驶汽车,而放弃了之前一直使用的脉冲信号控制方式。这辆车内配备了两个摄像头,并用模拟计算机技术进行信号处理。时速能达到30公里,但需要高架轨道的辅助。到了1983年,美国国防部高级计划研究局,也就是大名鼎鼎的DARPA开启了名为陆地自动巡航(ALV)的新计划,这个计划的研究目的就是让汽车拥有充分的自主权,通过摄像头来检测地形,通过计算机系统计算出导航和行驶路线等解决方案。动态视觉 除了美国之外,上世纪七八十年代,来自德国慕尼黑联邦国防军大学的航空航天教授Ernst Dickmanns开创了一系列“动态视觉计算”的研究项目,并且在EUREKA项目的资助下(欧洲道路环境与安全),成功的开发出了多辆自动驾驶汽车原型。Ernst Dickmanns团队的第一次成功突破是在1993年和1994年,该团队改装了一辆奔驰S500轿车(当时梅赛德斯成为了Ernst Dickmanns教授项目团队的合作伙伴),并且且其配备了摄像头和其他多种传感器,用来实时监测道路周围的环境和反应。当时,这辆奔驰S500成功的在普通交通环境下自动驾驶了超过1000公里的距离。便携式计算机加入 除了美国之外,上世纪七八十年代,来自德国慕尼黑联邦国防军大学的航空航天教授Ernst Dickmanns开创了一系列“动态视觉计算”的研究项目,并且在EUREKA项目的资助下(欧洲道路环境与安全),成功的开发出了多辆自动驾驶汽车原型。Ernst Dickmanns团队的第一次成功突破是在1993年和1994年,该团队改装了一辆奔驰S500轿车(当时梅赛德斯成为了Ernst Dickmanns教授项目团队的合作伙伴),并且且其配备了摄像头和其他多种传感器,用来实时监测道路周围的环境和反应。当时,这辆奔驰S500成功的在普通交通环境下自动驾驶了超过1000公里的距离。便携式计算机加入 美国卡内基•梅隆大学在1986年开始进行无人驾驶的探索。其中NavLab 1是该团队研究人员将一辆雪佛兰进行了改装,在车身上加入了五辆便携计算设备,不过行驶速度仅为20公里/小时。在1995年,VavLab发展到了第五代,对一辆1990年款的的Pontiac Trans Sport机型改装,通过在车辆上附加包括“便携式计算机、挡风玻璃摄像头、GPS接收器、以及其他一些辅助设备,来控制方向盘和安全性能,并且成功的完成了从匹兹堡到洛杉矶的“不手动”驾驶之旅,整个过程大约有98.2%的里程是百分之百无人驾驶,只是在避障的时候人为进行了一点点帮助。卡内基•梅隆大学的研究成果对于现在的无人驾驶技术提供了非常高的借鉴意义。更廉价的改造 美国卡内基•梅隆大学在1986年开始进行无人驾驶的探索。其中NavLab 1是该团队研究人员将一辆雪佛兰进行了改装,在车身上加入了五辆便携计算设备,不过行驶速度仅为20公里/小时。在1995年,VavLab发展到了第五代,对一辆1990年款的的Pontiac Trans Sport机型改装,通过在车辆上附加包括“便携式计算机、挡风玻璃摄像头、GPS接收器、以及其他一些辅助设备,来控制方向盘和安全性能,并且成功的完成了从匹兹堡到洛杉矶的“不手动”驾驶之旅,整个过程大约有98.2%的里程是百分之百无人驾驶,只是在避障的时候人为进行了一点点帮助。卡内基•梅隆大学的研究成果对于现在的无人驾驶技术提供了非常高的借鉴意义。更廉价的改造 ARGO项目是由意大利帕尔马大学视觉实验室VisLab在EUREKA资助下完成的项目。像许多之前的研究一样,ARGO也利用立体视觉系统,通过摄像头来检测周围的环境,通过计算机制定导航路线。在1998年,ARGO项目进行了2000公里的长距离实验,其中94%路程使用自主驾驶,平均时速为90公里,最高时速123公里。该系统成功的证明了利用低成本的硬件和成像系统,依然可以在视觉输入的情况下实现无人驾驶。DARPA的重大挑战 ARGO项目是由意大利帕尔马大学视觉实验室VisLab在EUREKA资助下完成的项目。像许多之前的研究一样,ARGO也利用立体视觉系统,通过摄像头来检测周围的环境,通过计算机制定导航路线。在1998年,ARGO项目进行了2000公里的长距离实验,其中94%路程使用自主驾驶,平均时速为90公里,最高时速123公里。该系统成功的证明了利用低成本的硬件和成像系统,依然可以在视觉输入的情况下实现无人驾驶。DARPA的重大挑战 DARPA在2004年,率先对无人驾驶汽车进行了有史以来最重要的挑战。当年,该团队成功的让无人驾驶汽车穿越了Mojave沙漠。随后的2005年,斯坦福大学一辆改装的大众途锐更完美的进行了挑战。这辆车不仅携带了摄像头,同时还配备了激光测距仪、雷达远程视距、GPS传感器以及英特尔奔腾M处理器。在城市中行驶 DARPA在2004年,率先对无人驾驶汽车进行了有史以来最重要的挑战。当年,该团队成功的让无人驾驶汽车穿越了Mojave沙漠。随后的2005年,斯坦福大学一辆改装的大众途锐更完美的进行了挑战。这辆车不仅携带了摄像头,同时还配备了激光测距仪、雷达远程视距、GPS传感器以及英特尔奔腾M处理器。在城市中行驶 在第一次成功挑战的三年后,DDARPA将实验场地从沙漠换成了城市,并且在斯坦福拉力赛中取得了第二名、Tartan Racing中获得了第一名的好成绩。随后,通过NavLab项目在该领域声名鹊起的卡内基•梅隆大学也取得了不错的成绩,并且获得了通用、Continental和卡特彼勒等公司的支持。从那时开始,无人驾驶汽车的功能就开始变得越来越复杂,需要处理其他车辆、信号、障碍以及学会如何与人类驾驶员和睦相处。谷歌加入 在第一次成功挑战的三年后,DDARPA将实验场地从沙漠换成了城市,并且在斯坦福拉力赛中取得了第二名、Tartan Racing中获得了第一名的好成绩。随后,通过NavLab项目在该领域声名鹊起的卡内基•梅隆大学也取得了不错的成绩,并且获得了通用、Continental和卡特彼勒等公司的支持。从那时开始,无人驾驶汽车的功能就开始变得越来越复杂,需要处理其他车辆、信号、障碍以及学会如何与人类驾驶员和睦相处。谷歌加入 2009年,谷歌在DARPA的支持下,开始了自己的无人驾驶汽车项目研发。当年,谷歌通过一辆改装的丰田普锐斯在太平洋沿岸行驶了1.4万英里,历时一年多。许多在2005至2007年期间在DARPA研究的工程师都加入到了谷歌的团队,并且使用了视频系统、雷达和激光自动导航技术。谷歌的大计划就此开始…洲际挑战 2009年,谷歌在DARPA的支持下,开始了自己的无人驾驶汽车项目研发。当年,谷歌通过一辆改装的丰田普锐斯在太平洋沿岸行驶了1.4万英里,历时一年多。许多在2005至2007年期间在DARPA研究的工程师都加入到了谷歌的团队,并且使用了视频系统、雷达和激光自动导航技术。谷歌的大计划就此开始…洲际挑战 2010年,VisLab团队,没错,就是当初实验ARGO项目的团队,开启了自动驾驶汽车的洲际行驶。四辆自动驾驶汽车从意大利帕尔马出发,穿越9个国家,最后成功到达了中国上海。整个期间VisLab团队面对了超过1.3万公里的日常驾驶环境挑战。值得一提的是,所有车载导航系统都是通过太阳能提供电量,到当时为止是第一个将可持续资源融入到无人驾驶汽车的项目。Navia shuttle 2010年,VisLab团队,没错,就是当初实验ARGO项目的团队,开启了自动驾驶汽车的洲际行驶。四辆自动驾驶汽车从意大利帕尔马出发,穿越9个国家,最后成功到达了中国上海。整个期间VisLab团队面对了超过1.3万公里的日常驾驶环境挑战。值得一提的是,所有车载导航系统都是通过太阳能提供电量,到当时为止是第一个将可持续资源融入到无人驾驶汽车的项目。Navia shuttle 一家法国名叫Induct的公司开发出了Navia shuttle汽车,与传统的无人驾驶汽车相比,它更适合在校园和公园中使用。这辆车可以自动学习路线,并且利用激光雷达传感器扫描障碍物,最高时速为13英里/小时。另一方面,英国同样也在测试一辆与Navia Shuttle类似的项目,名叫Meridian。这个项目大部分位于步行区。这些车辆并不供公众使用,而每辆车都会配备有执照的驾驶员。据悉,这两辆专用于步行区的无人驾驶汽车,还是纯电动车型。可爱的谷歌 一家法国名叫Induct的公司开发出了Navia shuttle汽车,与传统的无人驾驶汽车相比,它更适合在校园和公园中使用。这辆车可以自动学习路线,并且利用激光雷达传感器扫描障碍物,最高时速为13英里/小时。另一方面,英国同样也在测试一辆与Navia Shuttle类似的项目,名叫Meridian。这个项目大部分位于步行区。这些车辆并不供公众使用,而每辆车都会配备有执照的驾驶员。据悉,这两辆专用于步行区的无人驾驶汽车,还是纯电动车型。可爱的谷歌 2014年,谷歌对外发布了自己完全自主设计的无人驾驶汽车,并且在2015年,第一辆原型汽车正式亮相,并且已经可以正式上路测试。在这辆可爱的小车中,谷歌完全放弃了方向盘的设计,乘客只要坐在车中就可以享受到无人驾驶的方便和乐趣。汽车的未来 2014年,谷歌对外发布了自己完全自主设计的无人驾驶汽车,并且在2015年,第一辆原型汽车正式亮相,并且已经可以正式上路测试。在这辆可爱的小车中,谷歌完全放弃了方向盘的设计,乘客只要坐在车中就可以享受到无人驾驶的方便和乐趣。汽车的未来 除了谷歌和大学研究机构之外,现在传统汽车厂商也开始进行无人驾驶汽车的研发。今年年初,我们看到了来自梅赛德斯•奔驰的超现实F015概念无人驾驶汽车。这辆汽车不仅设计豪华,同时车内布满了各种作用的显示屏以及可旋转的座椅,彻底将无人驾驶汽车变成了一个可以移动的娱乐中心。来源:engadget 除了谷歌和大学研究机构之外,现在传统汽车厂商也开始进行无人驾驶汽车的研发。今年年初,我们看到了来自梅赛德斯•奔驰的超现实F015概念无人驾驶汽车。这辆汽车不仅设计豪华,同时车内布满了各种作用的显示屏以及可旋转的座椅,彻底将无人驾驶汽车变成了一个可以移动的娱乐中心。来源:engadget(此文不代表本网站观点,仅代表作者言论,由此文引发的各种争议,本网站声明免责,也不承担连带责任。) |